Hot




3Racing Automatic Crawler Winch With Control System for Crawler Car – Black
SKU:
CR01-27
6 in stock
$29.99You save

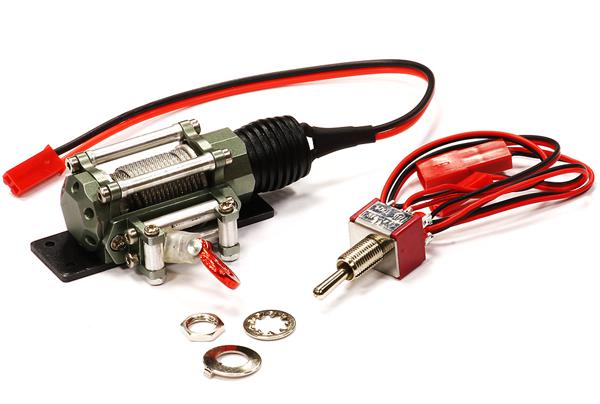
Billet Machined Realistic Power Winch for Scale Rock Crawler 1/10 Size
SKU:
C24659GUN
50 in stock
$21.19You save

Billet Machined T5 Realistic High Torque Mega Winch for 1/10 Scale Rock Crawler
SKU:
C25452BLACK
50 in stock
$20.79You save

Realistic Scale Plastic Model Winch Cable w/ Hooks 1/10 Size
SKU:
C25431RED
1 in stock
$6.55You save
Reviews
Clear filtersThere are no reviews yet.