



20x150mm Battery Strap (4) for RC Car, Boat, Helicopter & Airplane
SKU:
C27934BLUE
53 in stock
$6.99You save

20x150mm Battery Strap (4) for RC Car, Boat, Helicopter & Airplane
SKU:
C27934RED
78 in stock
$4.89You save

INDI Octane 2 – 20A High-Performance Battery Discharger – Individual Cell
SKU:
MT7901-20
303 in stock
$7.50You save
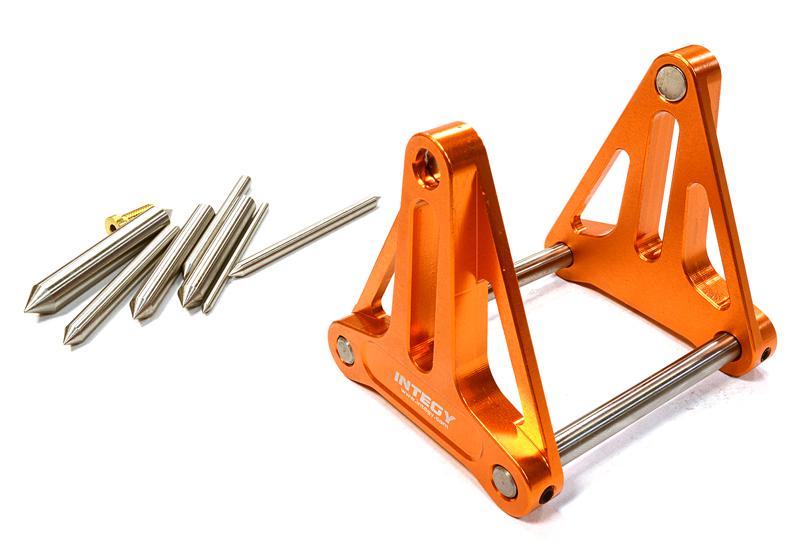
Magnetic Prop. Balancer for RC Boat w/ Shaft Size 1/8, 3/16, 1/4, 2, 3, 4 & 5mm
SKU:
C26407ORANGE
43 in stock
$21.74You save

Multicolor 300mm Battery Strap (5) for RC Car, Boat, Helicopter & Airplane
SKU:
C24836
8 in stock
$6.99You save
Reviews
Clear filtersThere are no reviews yet.